dSPACEʵʱ����ϵͳ���ɵ¹�dSPACE��˾������һ����MATLAB/Simulink�Ŀ���ϵͳ��������ʵ��������Ӳ������ƽ̨��ʵ���˺�MATLAB/Simulink/RTW����ȫ�����ӡ�dSPACEʵʱϵͳӵ��ʵʱ��ǿ���ɿ��Ըߣ������Ժõ��ŵ㡣dSPACEӲ��ϵͳ�еĴ��������и��ٵļ������������䱸�˷ḻ��I/O֧�֣��û����Ը�����Ҫ������ϣ����������Ĺ���ǿ����ʹ�÷��㣬����ʵ�ִ����Զ�����/���غ�����/���Ե������ߡ�dSPACE��Ӳ��Ŀǰ�Ѿ���Ϊ���п��ٿ���ԭ����֤�Ͱ�ʵ��������ѡʵʱƽ̨��
ʵ�ֿ��ٿ���ԭ�ͺ�Ӳ���ڻ�·����
RCP(Rapid Control Prototyping)�� ���ٿ���ԭ��
Ҫʵ�ֿ��ٿ���ԭ�ͣ������м������ñ���ʹ�õĽ�ģ����ơ����߷��桢ʵʱ���������Թ��ߡ� dSPACE
ʵʱϵͳ����������ģ����ƣ���������ʵʱ���档�������Ϳ��Խ�������֮����������Ƴ��ڣ�ʹ����ķ��ü�����С��
ʹ�� RCP �����������ڷ��ú�����֮��������ԣ������ղ�ƷӲ��Ͷ��֮ǰ����ϸ�о�������ɢ��������Ƶ�ʵȵ�Ӱ�졢�㷨�����ܵ����⡣ͨ��������ԭ��Ӳ��ϵͳ����Ҫ���Ƶ�ʵ���豸���������Է����о�ʹ�ò�ͬ����������������ʱϵͳ���������������ң�������������·��
BYPASS ��������ԭ�͵�ص�Ԫ�� ECU �� Electronic Control Unit
��������������ڿ��������У��Ӷ�����ɴ�ԭ�Ϳ���������Ʒ�Ϳ�������˳��ת���� RCP �Ĺؼ��Ǵ�����Զ����ɺ����أ�ֻ���������һ�㣬�Ϳ��������Ƶ��ġ�
HILS(Hardware-in-the-Loop Simulation)����ʵ�����
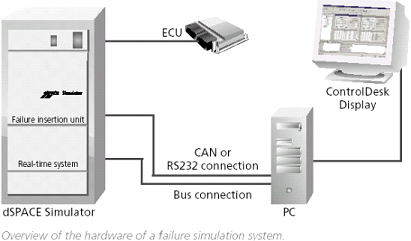
�����Ϳ���ϵͳ��ƽ����������Ƴɲ�Ʒ�Ϳ���������Ҫ�ڱջ��¶��������ϸ���ԡ�����������ԭ���磺�����ԡ�ʧЧ���ԣ�������ʵ�����в��Է��ýϰ���ȣ�ʹ�������Խ��У����磺�ڻ�ѩ���ǵ�·���Ͻ�������������װ�ã�
ABS ����������СĦ�����Ծ�ֻ���ڶ�����ѩ���������У���ʱΪ�����̿������ڣ�����ϣ���ڿ��������л��������ڵ�����£��磺���ƶ�������������п�������������в��ԡ�
dSPACE ʵʱ����ϵͳ�� HIL ���潫���������һ���⡣
dSPACE��������
������Ա�ڽ��п���ϵͳ����ʱ��������Ҫͬʱ�����������Խ�������⣬��������ʱ��ȴҪ�����������ȡ���ˣ�ֻ�и߶ȼ��ɵ�ϵͳ����������һ��Ҫ��
dSPACE ϵͳ��Ʋ������ǽ��п��Ʒ�������ƺ����߷��棬������ʵʱ���ٿ���ԭ�͡�����֤��������Ʒ�Ϳ�������ת����Ӳ���ڻ�·���ԡ�
dSPACE Ϊ RCP �� HILS �ṩ��һ�������������ϵͳ��ƵĹ��� -CDP ��
Control Development Package ���� CDP ��Ҫ�������й��ߣ�
MathWorks ��˾ Simulink ���������л��ڷ���ͼ�����߷���
MathWorks ��˾ Real-Time-Workshop: �����ӷ���ͼ���� C ����
dSPACE ��˾ Real-Time Interface (RTI): ����������Ӳ��ϵͳ��صĴ��룬ʹ��������ڵ�������
/ �ദ����Ŀ��ϵͳ������
dSPACE ϵ���������ߣ������Աջ�������н�������(�Զ�/�ֶ�)
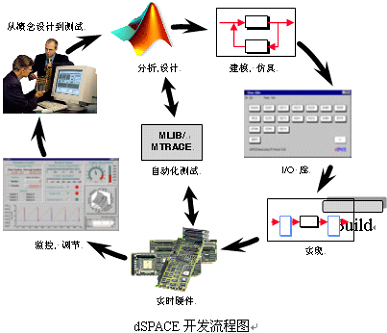
���� CDP ��������ɴ�ϵͳ��ģ�����������߷���ֱ��ʵʱ�����ȫ���̣���ʹ������Աȫ���ע�ڿ��Ʒ����Ĺ�˼��������������������ϻ����൱���ʱ�䣬�Ӷ����Դ�����̿������ڡ�
dSPACEϵͳ�ص�
dSPACE ϵͳ���и߶ȵļ����Ժ�ģ���ԣ������û������������齨�û�ϵͳ����������������Ӳ����
dSPACE ���ṩ�˶���ѡ�� dSPACE ӵ�е���ϵͳ�����ϵͳ�Լ��ڶ�� I/O �ӿ�ģ�壬����������������Ӧ�á�
dSPACE ϵͳ����ͼ�ο������棬��ȥ�˿�����Ա�ֹ���̵��Եķ��Ӷ������ڳ����Ĺ����� dSPACE
��Ʒ����������Ӳ�������֣�����Ҫ������ RTI �� ControlDesk �� TargetLink
�ȡ�
dSPACE Ӳ���ڻ�ϵͳϵͳ�ο�����
Ӳ�����֣�
DS1006 PPC��������-������AMD Opteron
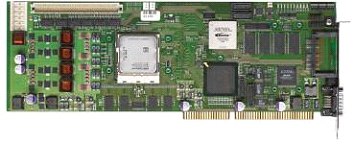
DS1006����������dSPACE��˾���Ƴ��Ĵ������壬��Ŀǰ���ڿ���ԭ�ͣ�RCP���Ͱ�ʵ����棨HIL���������ٶ����Ĵ������塣��������64λOpteron����������Ҫ���ڴ������綯��ϵͳ��������ȸ��ӵġ����͵ġ��Դ�������Ҫ�ߵ�ģ�͡�
DS1006�������AMD Opteron��Ϊ�����������ô�������ҵ���һ�������64λAMD64������x86��������Ʒ�������ڲ�������һ��1MB��
L2 cache��ͻ���ڴ�ƿ����DS1006���������ϼ�����һ��256MB �ı��ش洢����������ʵʱģ�ͣ�һ��128MB
��ȫ�ִ洢�����ں���λ���������ݽ��������⣬�û������Ը���ʵʱӦ�õ���Ҫ����һ��2MB �İ�������flash
�洢������ѡ��������ʹDS1006��������������������ܡ�
DS1006�忨֧�ֶദ����Ӧ�á��û����Ը�����Ҫ���������DS1006��������ͨ�����������������һ�����ܸ��ߵģ���ҪDS911
Gigalink ģ�飩���ദ����֮��ͬ�����е�ϵͳ��
DS1006�����ص�
| ������ |
AMD
Opteron 248 (2.2 GHz)
64 kB L1 ����cache, 64 kB L1 ָ�� cache
1 MB L2 cache
Cache ��������ʱ���������� |
| �ڴ� |
256
MB DDR SDRAM �����ڴ�����Ӧ�ó���Ͷ�̬Ӧ������
128 MB SDR SDRAM ȫ���ڴ�������������������
�����ɷ���ȫ��ȫ���ڴ�
����2 MB ���������������� |
| PHS���߽ӿ� |
������ԭ��I/O������
32λͬ��I/O����
20Mb/s�������ʣ����µ�I/O�ӿڰ��ṩ30Mb/s��������
����64�� PHS�����ж�
��������I/O�岢�в��������µ�ͬ���� |
| ��ʱ�����ж� |
����ͨ�ö�ʱ�����ദ����ϵͳ��
ʱ��ͬ����Ԫ
�жϿ�������ʵ�ֶ��20���ж�Դ���� |
| ���д�������ѡ���� |
��DS911Gigalinkģ��
���ٹ��˽ӿڣ���������>1.25Gbit/S
������20����������
���³�������ܴ�100m
4·˫������ͨ��
ʵʱ�жϴ��� |
| ���� |
ISA
����: +5 V ��5%, 2.0 A
+12 V ��5%, 0.5 A (����DS911ģ��)
+12 V ��5%, 1.5 A (��DS911ģ��)
CPU��Դ��ͷ: +5 V ��5%, 20 A |
| �������� |
��Ҫ����16λȫ����ISA���
��DS911��DS814���ӵ�ʱ����Ҫ����ISA���
�¶ȷ�Χ0 - 40 ��C (ʵ����ʹ��)
���PX10��PX20�ڲ���̨����ʹ��
PX10 �ɷ���һ��DS1006��PX20�пɷ���2��DS1006 |
���ϵͳI/O�� ���� DS2302ֱ�����ֺͺϳɰ�
 ʵʱ�߾����źŷ�����
ʵʱ�߾����źŷ�����
HIL����������
6ͨ���������źŷ���
6��16λ����DAC��ģ�����
Ӧ������
Ϊ�˳�ֲ���ECU����ʹ���������������ĸ���Ҳ��Ҫ�����档���磬������HILӦ���У�������������ź�����Ϊ�˸߾�����ת����ʽ�������źű������緢����ת�٣�����ʵʱ�ı䣬����ģ�Ⲷģ�鱻������������Ƶ�ѹ������SI������piezo����Դ�ĺ���������
��Ҫ�ص㣺
DS2302�ܹ����渴�Ӵ������źŲ���������ECU�����ܹ����㸴���ԣ�������Լ��ֱ��ʶ����ϸ�Ҫ��DS2302װ����6��DSP���ܹ��������٣����Σ��ܹ���ʱ����ÿ���źŲ�����������������źŲ������Լ������������������PC���ı䡣DS2302
C���������ܹ��������������DSP�����������ݽ�����ͨ��DS2302��DPMEM������ͨѶ��
����֧��
����PC�ˣ����룬���ã����ع��ߣ�ִ��ʱ����������SPEEDCHK����༶�Զ��Ż����ߣ�
ͨ��dSPACE�����������DS2302���ƺ��ڴ�Ľӿڿ�����Ҳ����֧���û�����������˽������Ƶĵ��ã�
����Ӧ�ã�����/���������ʽ�����ź�ģ����
| ���� |
����ָ�� |
| ͨ������ |
6·
����ֱ�����ֺϳ�ͨ�� |
| ������ |
DSP |
Texas
Instruments TMS320C31���� DSP
60 MHz ʱ��Ƶ�ʣ�33 ns ѭ��ʱ��
����32λ��Ƭ��ʱ��/�¼�������
��ƬDMA
ÿ�� DSP����һ���ⲿ�ж�����
ÿͨ�������Զ������ź�
2 K�ֽ�32λ��Ƭ RAM
2����ʱ�� |
| �ڴ� |
DPMEM |
ÿͨ��16
K x 32-bit��ʵDPRAM
�������س���Ͷ�/д���������� DSP���ͨѶ) |
| DSP
�ж� |
On-board
I/O (���綨ʱ������ DMA),�ⲿ���� DSPͨ��, �� PC |
| �жϿ����� |
ÿ��DSPͨ������һ��PHS�����ж� |
| Plug-on
ģ�� |
Plug-on
DAC ģ��(��ѡ) (����)
Plug-on ADC ����ģ�Ⲷģ�� (��ѡ) |
| ����I/O |
��ѹ��Χ |
TTL����/��� |
| ������� |
Max.
-800 ��A/+1.5 mA |
| ������ |
ÿ��DSP��7
·����I/O lines
�����������ɱ��
1·line ��Ϊ�ⲿ�ж�����ɱ�� |
| �������� |
44�Ÿ���Sub-D
�������ͷ |
| �����ӿ� |
64K��I/O�ռ��е�7��16λI/O
�˿�(ISA����)������.
һ��16λISA ��� |
| �������� |
�ߴ� |
338
x 114 x 20 mm (13.3 x 4.5 x 0.8 in) |
| �¶� |
0
�� 70 ��C (32 �� 158 ��F) |
| ���� |
+5
V ��5%, 4.0 A (����6�� DAC ģ��) |
DAC ģ��
| ����
|
����ָ�� |
| ͨ������ |
ÿͨ��һ��
D/A ת����
16λ�ֱ���
I/O�������� (�ɱ��) |
| ģ�����
(25 ��C����ֵ) |
�����ѹ��Χ |
��10
V |
| ������� |
Max.
��5 mA |
| ��ʼ��Ffset��� |
��1
mV |
| ��Ffset
drift |
��10
ppm ��F FSR/K (FSR =������) |
| ��ʼ������� |
��0.5% |
| ����drift |
��20
ppm ��F FSR/K |
| ����ʱ�� |
0.8
��s typ. at ��0.012% ��F FSR |
| ��ת�� |
��Լ
25 V/��s |
| ��������� |
��1
LSB (��С��Чλ) |
| ������ |
14
λ |
| �ܹ�г��ʧ�� |
-90
dB ( 10 kHz) |
| �������� |
�ߴ� |
92
x 18 x 10 mm (3.6 x 0.7 x 0.4 in) |
| �¶� |
0
�� 70 ��C (32 �� 158 ��F) |
| ���� |
0
�� 70 ��C (32 �� 158 ��F) |
���ϵͳI/O�� ���� DS4201-S �������߽ӿڰ�
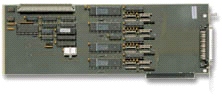
����dSPACEϵͳ���ⲿ�豸�Ĵ���ͨѶ
��Ҫ����
֧��RS232, RS422, RS485�շ���
��������ϵͳ�䳤����ͨѶ
| ���� |
����ָ�� |
| �ſ� |
4����������ͨѶͨ����ÿͨ��������һ��PC16550D(UART)ͨ���첽�շ���
֧��Э�����ͣ�RS232-C��RS422��RS485 |
| �ж� |
�ɱ���жϿ��Ƶ�Ԫ����֧��4·����ͨѶ�ж� |
| ����ͨѶͨ�� |
4��RS232ͨ��
��ѡ��RS422��RS485ͨ��
ʱ��Դ�����24MHz��RS422��RS485��ѡ��Ҳ���û����ƣ�
���ƽ�������ƹ��� |
| �����ʷ�Χ |
RS232 |
1.8432
MHz ʱ�ӣ����115.2 Kbaud |
24
MHzʱ�ӣ����115.2 Kbaud
(��RS232�շ�������) |
| RS422 |
1.8432
MHzʱ�ӣ����115.2 Kbaud |
24
MHzʱ�ӣ����1.5 Mbaud |
| RS485 |
1.8432
MHzʱ�ӣ����115.2 Kbaud |
24
MHzʱ�ӣ����1.5 Mbaud |
| У��λ��Parity
bits�� |
ż���������У��λ |
| ֹͣλ��Stop
bits�� |
1,
1.5��2 bits |
| �ֳ���Word
length�� |
5,
6, 7��8 bits |
| FIFOs
|
16
byte input FIFO
16 byte output FIFO |
| �������� |
50��Sub-D���ͽ�ͷ |
| �������� |
һ��8��16λISA�ۣ������ڹ��磩 |
| �������� |
�ߴ� |
340
x 125 x 15 mm (13.4 x 4.9 x 0.6 in) |
| �����¶� |
0
... 70 ��C (32 ... 158 ��F) |
| �����ѹ |
+5
V ��5%, 350 mA
+12 V ��5%, 75 mA |
���ϵͳI/O�� ���� DS4302 CAN ���߽ӿڰ�
 CAN ���߽ӿڰ�:
CAN ���߽ӿڰ�:
dSPACE ϵͳ�� CAN ���ߵ�����ģ��
4 ��CAN ����ͨ��
Ӧ������
��Ҫ�����ͣ�Ӧ������:
�������ÿ���������ԭ��
Ӳ���ڻ�����
�������߷���
�Զ���������
��Ҫ�ص�
DS4302 ��ֱ�ӽ� dSPACE ϵͳ���ӵ�CAN �����ж�����Ҫ���ö���ĵ�·�ӿڡ�����4��������ͨ���Ͼ���3���������շ���ʹ�������ڼ������е�Ӧ���������а���һ���ʺ���Ӳ��ʵʱͨ�ŵĸ����շ�����һ���ݴ������շ�����DS4302
��ÿһ�����ö�����Simulink��ֱ�����ã���˲���Ҫ�����CAN ���߿�������
ȫ�������֧��
���� RTI CAN�������ܹ�������ͨ���Ի���ʽ��Simulink®���������е�
CAN���߽ӿ� ��������Ҫ���CAN ���߿����������õ�ѡ���ṩ�˴��ж����õ�ʱ�����á�����CANӲ�������ķ�ʽ���ǽ�CAN-DB�༭�ļ����롣Ϊ����Ч�Ķ�̬�������ӵ�CAN��������Ӳ���ڻ�ϵͳ�е�Ӧ�ã������߽ӿڰ����ṩ����һ��Simulink?
ģ�����ܹ��������CAN������Ϣ����> 200 messages����ʵʱCAN���߽ӿڶ�ͨѶ�����䡣
RTI CAN ������ ��ʵʱCAN���߽ӿڹ�����
RTI CAN ��ͨѶ�����䡪ʵʱCAN���߽ӿڶ�ͨѶ������
| ���� |
����ָ�� |
| ͨ������ |
4
��������CAN����ͨ��
ÿ��ͨ����3����ͬ���շ���
ģ�����ö��4���ͻ�����CAN�����շ��� |
| ������ |
����DSP |
50
MHz (TMS320C32 from Texas Instruments)
���� CAN ���߿�����ͨѶ |
| �洢�� |
���ش洢�� |
128
k x 32λ SRAM
512 k x 8λ ���� |
| ˫�˿ڴ洢��
(DPMEM) |
8
k x 32λ ˫�˿ڴ洢�� (DPMEM)������PHS���� �� ����DSP
֮���ͨ�� |
| �жϿ����� |
CAN
�������ж�
���ֲ�ͬ�ж�Դ |
| ������ |
CAN
2.0 A (������)
CAN 2.0 B (��������)
ISO DIS 11898-2 �C ���� CAN ����
ISO 11519-1 �C ����CAN ����, �ݴ����� |
| ����CAN���߽����� |
������оƬ |
82C251
ISO11898 ���ٽ�����֧�ִ������ʸߴ� 1 Mbaud
TJA1054 �����ݴ����Խ������������ʴﵽ 125 Kbaud
SN75176 RS485�Ľ��ͽ������������ʴﵽ 500 Kbaud
������ֹ������ (����������)
8 λ˫�� I/O �����ߵĿͻ����������� |
| ���� |
Full-CAN������
(Intel AS82527)
�ɱ��ʱ�ӿ����� |
| �����ӿ� |
һ��8λ��16λ
ISA ��� (����Դ����) |
| �������� |
�ߴ� |
340
x 125 x 15 mm (13.4 x 4.9 x 0.6 in.) |
| �¶� |
0
�� 70 ��C (32 �� 158 ��F) |
| ��Դ |
+5
V ��5%, 2.5 A
+12 V ��5%, 140 mA |
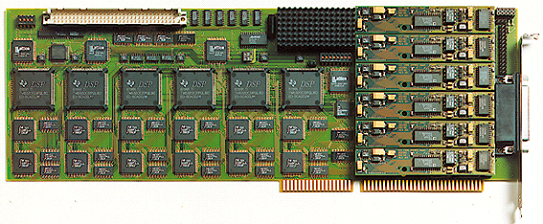
���ϵͳI/O�� ���� DS2004 ����A/D��
 ���پ�ȷA/D��
���پ�ȷA/D��
16·���ٸ߾���A/Dͨ��
4���ⲿ�������������չ����������
��������ת��ģʽ
Ӧ������
DS2004������ģʽ�ṩ�����ַ�ʽת������ֵ
��������ģʽ����һ��ת���������ʱ����һ�������Զ���ʼ�����������壬���Բ���ֵת�����������ڲ���ʱ�������ⲿ������������
��������ģʽ������ת�����������ߴ����¼�����
DS2004�Ĵ�������ģʽ�������ڶ��崰���ڲ���¼���ݡ����磬��ȼ����ͬ���Dz��������ܵ�Ӧ�ð�����������ѹ�����ƺͽǴ����еı����źŵIJ���
��Ҫ�ص�
DS2004 16��ͨ������һ��������16λ�������A/Dת������ÿ��ͨ����ת��ʱ��Ϊ800ns������ģʽ����4���ⲿ�������������չ��������ʹ�õ�����ֵ����ȫ���������ת�䶼��Ϊ���ܡ��ð�ÿͨ���������16384��ֵ��Ȼ���������Ϊһ�����巢���������塣���ض���ͨѶ������ȫ�������ϵͳ���ܡ�
| ���� |
����ָ�� |
| ͨ������ |
16·A/D����ͨ������֣�
16·����A/Dת����
16λ�ֱ���
0.8 ��s ... 1 s ������� (�ɵ���)
��5 V ���10 V��ѹ��Χ��ÿͨ�����ɱ�̣�
��12V�����ѹ������Χ
4���ⲿ��������line |
| ADCs1),
2) |
ת��ʱ�� |
800
ns |
| ��ʼoffset��� |
��1
mV |
��ʼ�������
|
��0.1%
of FSR |
| ����offset
|
��2
ppm of FSR/K |
����drift
|
��20
ppm of FSR/K |
�������
|
��0.003%
of FSR |
���������
|
��0.003%
of FSR |
��ʧ��
|
15�ֱ���û����ʧ�� |
SNR
|
��+85
dB (at 10 kHz, 10 V range)
��+83 dB (at 10 kHz, 5 V range) |
THD
|
��-85
dB (at 10 kHz, 10 V range)
��-83 dB (at 10 kHz, 5 V range) |
ͨ������
|
��-95
dB |
CMRR
|
��+85
dB (at 10 kHz �ź�Ƶ��) |
| �����迹 |
1
M�� |
|
�������ѹ���� |
��50
V continuous, ��60 V for up to 10 s |
| �жϿ����� |
��������
������
���ݶ�ʧ
ת��������� |
| �ⲿ�������� |
�����ѹ |
CMOS
level |
| �������ѹ���� |
��50
V continuous, ��60 V for 10 s |
| �����ӿ� |
һ��
8��6λ ISA ��� (������Դ����) |
| �������� |
�ߴ� |
340
x 125 x 15 mm (13.4 x 4.9 x 0.6 in) |
| �¶� |
0
�� 70��C (32 �� 158 ��F) |
| ���� |
+5
V ��5%, max. 1.5 A
+12 V ��10%, 2.0 A |
����忨DS5203

| IO�忨 |
DS5203
FPGA����忨 |
| FPGA��Դ |
Xilinx
Virtex-5 SX95T
����Ԫ����94298
�ֲ��洢����1520kBits
���д洢�� ��8784kBits |
| ������Ƶ |
100MHz |
| ����IO |
16ͨ������ɵ�
�������룺��ֵ1V��7.5V�ɵ�
�������������������ߵ�ƽ3.3V��5V�ɵ� |
| AD |
����6·14λ��ˮ��ADת����
ת����10MSPS
�����ѹ��Χ��5V�͡�30V�ɵ� |
| DA |
6·����14λ
ת����10MSPS
�����ѹ��Χ��10V |
| �����ṩ��FPGA��� |
��ת��ѹ������������� |
���ϵͳI/O�� ���� DS4004 HIL�������������
DS4004�忨�߱�96·��������������������ѹ����һ�㳵�ϳ��õ�Դ��һƥ�䣬���а����ˣ�12V,
24V, 36V, 42V���ǿͻ��Զ���TTL��ƽ�ĵȵȣ���96·�źű�����Ϊ������ͬ��Ⱥ�鹩ʹ����ѡ�ã�����ÿһ��Ⱥ�鶼������������ͬ�Ĵ�5V~60V�ĵ�ѹ��ƽ����96���ܽŶ�����ͨ�������������ã����Ա�����ΪPWM�����PWM�������Ƶ�ʵ����⣬�Ի��Ƿ��������ɡ���������������Ա�����������ʹ�ã�Ҳ��ͬ����32λ���ֳ����á����ҿ������ó�ʼ������ֹʱ�ĵ�ƽ״̬��
�ڳ��������У�DS4004��һ���Լ۱ȼ������ڳ������ӷ����HIL�忨��Ҳ��ȫû������Ŀ��Լ�������ӵ��������У����гߴ����ȫ�ߴ�ķ������δ���Ĺ滮�ϣ�DS4004������Ҫ�κε��źŴ����Ϳ���ֱ�������ڿ���������HIL�IJ��ԡ�
| ���� |
����ָ�� |
| I/O�ܽ� |
�߱������źŵ�����96·˫���������������λ���������ӿڣ��߱�32���ܽţ���ȥ�����ã�P1,
P2, P3��
������������Ϊ����I/O����ʱ����أ����⣩������I/O
PWM�Ĺ��ܿɴﵽ50ns |
| �������� |
�����ѹ |
0��+60V |
| �Ƚϵ�ѹ��ƽ |
1V��23.8V
(����������) |
| �����迹 |
390k�� |
| ����ѹ���� |
0��+60V���� |
| ������� |
�����ѹ |
+5V��+60V(������Դ����)
6��������VBAT_Px_y(ÿһ��������P1��P3) |
| ���������Χ |
����50mA����·�����������Դ���߱������ñ���˿ |
| Vout
high,��Сֵ |
VBAT-1.2V;
��+50mA |
| Vout
low,���ֵ |
0.4V;
��-50mA |
| �жϿ����� |
�жϽ�λ |
3
x 2�ܽţ�ÿһ���������߱������ܽţ� |
| ������Դ |
�жϾ�������Դ���½�Դ��˫�� |
| �Ƚϵ�ѹ��ƽ |
1V��23.8V
(����������) |
| �����ӿ� |
һ��
8��6λ ISA ��� (������Դ����) |
| �������� |
�ߴ� |
340
x 125 x 19 mm (13.4 x 4.9 x 0.7 in)
�˰忨��Ҫ������� |
| �¶� |
0
�� 55 ��C (32 �� 131 ��F) |
| ���� |
+5
V ��5%, max. 1.5 A
+12 V ��10%, 0.4 A
-12 V ��10%, 0.4 A |
| ������� |
6��������VBAT_Px_y��+5V��+60Vֱ���磩
ÿһ����Ӧ��Դ��0.2A max. (0.05A typ.) + ����ܽŵĸ��� |
��������
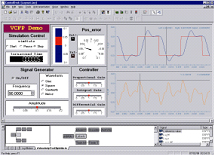
�ۺ�ʵ�黷�� ���� ControlDesk
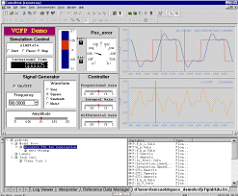
ControlDesk��dSPACE����һ��ʵ�鹤���������������Ŀ���������ģ�͵Ľ���ʹ��MATLAB/simulink�����ǣ�һ��ģ���Ѿ�ͨ��RTIʵ�ֲ����ص�ʵʱӲ���У����µĹ�������ControlDesk����ɡ�ControlDesk���ṩ��ʵ����̵Ľ����ۺϹ�����
Ӳ����������
���������DZ���ͼ�λ�����
�������ӻ�����
ControlDesk�����ص�
| ��ʵʱӲ����ͼ�λ����� |
���Ϸŷ�ʽ���ɽ���
��ʵʱ������ж�̬���ݽ���
����ʵʱ����
���ߵ���
��¼ʵʱ���ݣ��ɼ�¼���ļ��У�
ʵʱ���ݻط�
�ṩ����רҵ�����DZ��⣨������ȣ� |
| �����DZ� |
���Ϸŷ�ʽ���ɽ���
��ʵʱ������ж�̬���ݽ���
����ʵʱ����
���ߵ���
��¼ʵʱ���ݣ��ɼ�¼���ļ��У�
ʵʱ���ݻط�
�ṩ����רҵ�����DZ��⣨������ȣ� |
| �����Ŀ��ӻ����� |
��ͼ�η�ʽ����RTI���ɵı����ļ�
ͨ���ϷŲ����ڱ����������DZ�֮�佨����ϵ
������һ������⣬���ɷ����������ʱ�䡢�ж����ȼ�������ִ��ʱ���������ʵʱ������صı��� |
| �����Ŀ��ӻ����� |
�ɸ���ʵʱ���������ɲ����ļ�
ͨ�������ļ���ʵʱ���������������
ͨ����������ļ���˳����룬�о���ͬ�������ʵʱ�����Ӱ�� |
| ʵ������Զ��� |
�ṩ��ControlDesk������ɲ��ֵı�̽ӿ�
�Ժ�ʱ�����ظ����е�������̿���ʵ���Զ������磺�����о�
����Macro Recorder��¼ControlDesk�IJ���
�����������Ĺ���ǿ����㷨���Ա����Զ������㷨
�ṩ��MATLAB�ӿڣ�ʵ����MATLAB�����ݽ��� |
| ���⣬����ദ����ϵͳ���ʹ��ʱ����ҪControlDesk
Multiprocessor Extenssion�� |
���Ϸ��� ���� ControlDesk��Failure Simulation��
�Ա�ControlDesk���ܵ���չ
�����ͻ����dSPACEģ������Զ�̿��ƹ���ע�뵥Ԫ
ͨ�����Ϸ���������ɷ������й��Ϸ��沿��
�ڹ���ģʽ������ʵ�ֹܽŴ�����
�ɵ���ECU�ܽ������ļ�
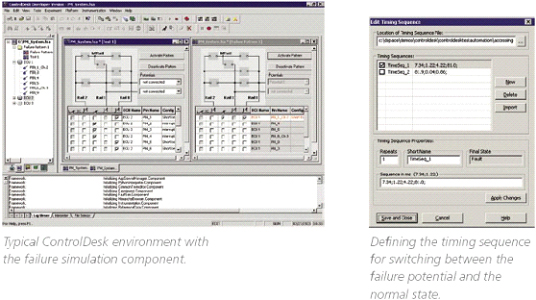
ControlDesk�Ĺ��Ϸ��湦��ʹ�ò���dSPACEģ�����Ĺ���ע�뵥Ԫ��÷dz�����������CotrolDesk���Ϸ��湦�ܿ��Է����ص�Ԫ(ECU)���������ϡ���������Է���ECU�����ܽŶԵض�·���ѹ��·���ϣ������Ƿ���ECU�����ܽŶ��ߵ������
���鼰���������Զ��� ���� MLIB��MTRACE
����MLIB��MTRACE�����Դ����ǿdSPACEʵʱϵͳ���Զ�ʵ��������ʹ������������ڲ��ж����������£���MATLABͨ��M���ֱ�ӷ���dSPACE�������е�Ӧ�ó����еı�������������֪�������ĵ�ַ���б��������㹻�ˡ������Ϳ�������MATLAB�����ּ��㼰ͼ����������˳���Զ����ԡ����ݼ�¼�Ϳ��Ʋ������Ż���
MLIB��MTRACE����ʹ�ÿ����һ�����������塣��MATLABǿ��ļ���������֧�֣������Զ�ִ�������뵽���κ����顣������������Ż�����MTRACE��¼���ݣ�Ȼ�����ݴ���MATLAB��MATLAB�Զ�������µĿ�������������ͨ��MLIB�ͻش����������ư塣
MLIB��MTRACEҲ���Ժ�ControlDeskͬʱʹ�á�
��PCʵʱͨѶ��̽ӿ� ���� CLIB
ÿһ��ʵʱ�������鶼��Ҫ�������Ϳ�����/������֮����н����������磺�ı��������¼���ݡ�������ʾ�ȡ�dSPACE��ControlDesk����������Ϊ�ֵĿ��������ṩ��ȫ��Ľ��������
���ǣ���ijЩ����£����ܻ���Ҫ��û��dSPACE���ߵ�����½��п��ƣ�����������ԡ�ʹ�������Ŀ��ӻ�����ʹ���û���д��������ȡ�
CLIB�����������ߺ�ʵʱӲ��֮�佨����ϵ��CLIB����һ����C�����������������û������棬��ɸ��ִ��������ƹ��ܣ����ʴ������洢�������ɴӱ����ķ������Զ�Ѱ�����ַ��CLIB�������������dSPACE���ߺ�dSPACE����Ĺ��ߣ�ͬʱ���ʴ�������
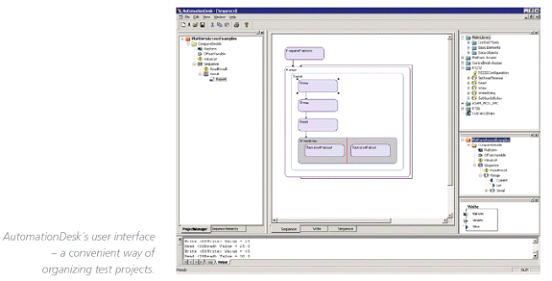
�Զ������Թ��� ���� AutoMationDesk
ͼ�λ��IJ������б༭��
���ڹ������Ͳ�����Ŀ����Ŀ������
����չ���Զ����Կ�
���ڷ���Simulink ��ʵʱ�������
���������������̵IJ���
Ϊ������Ŀǰ��������������������Ҫ��AutomationDesk�ṩ��һ��ǿ�������ҷ���IJ����Զ������������ṩ��һ��������ControlDesk��ͼ���û����棬�û����Ժ�ֱ�ۡ��ܷ���ض������в��������������ṩ��һ����Ч��ͼ�λ��������б༭����ͨ������༭�����Է���ض��Զ��������н��б༭�����⣬�û�Ҳ����ͨ����Ŀ����������֯���͵IJ�����Ŀ�������в��ԡ��û������Խ������Զ����Ժ����洢��һ�����ݿ��й��Լ����á�������ݿ�����չ��ά������dz����㡣AutomationDesk��dSPACE���������һ�������Ĺ��ߡ���Ϊ���Vģʽ�����и��������ܹ�ʵ�������ӵĻ��������ζ�Ž����ڿ�����ص�Ԫ��ECU�������п��Դ���ȵؽ�ʡʱ��ͳɱ���
 AutoMationDesk�����ص�
AutoMationDesk�����ص�
�������б༭��
��ͼ�λ��ķ�ʽ�����Զ����Ե�˳��
������ʽ�ĸ�Ч����ģʽ
ǿ����Զ������Թ��ܡ���AutomationDeskͼ�β������п��п��Է������������ʽ�ϳ��Զ����Թ���ģ�顣
��Ч�ı༭������ʹ�ò��Թ�����üͿ��١�
�������Զ�����˳��༭���пɷ���Simulink ��ʵʱ������������������û���ϵͳ���ڹ��ܿ�����Ӳ���ڻ�·�����ڼ�Ϳ��Զ�ϵͳ�����Զ������ԡ���Ҳʹ���ظ�ʹ���Զ������Գ�Ϊ���ܡ�
��Ŀ������
�������͵IJ�����Ŀ�����ݺͽ����
���ԵĹ����Լ�������Ŀ�Ľṹ������
�뿪��ϵͳ������
�Զ����ɻ���XML��HTML��PDF������
�Զ����Կ�
��¼�����ɼ����ź�
�������������
����Ϲ���DTS6�нӿ�
ͨ��ASAM-MCD 3MC (���� ASAP3) �ӿ�Զ�̿����ⲿ�궨����
������MATLAB�ȵ��������߽���
ͨ��������PC��ͨѶ
������չ������ͨ��������ʽ
����Simulink �� ʵʱ�������
��ControlDesk����Զ�̿���
����Ϸ���ӿ�
���ŵĽṹ
ͨ��AutomationDesk�ɼ�������Python�ű�
������뼴����չ
ͨ��DLL �� COM�ӿڷ�ʽ����Զ�̿��Ƶ���������